
انواع چینش سنسورها در ربات مسیریاب
اگر بخواهید در زمینه ساخت ربات های مسیریاب تخصصی کار کنید و یا در مسابقات شرکت کنید باید سعی کنید با توجه به قوانین و شرایط مسابقه بهترین طرح سنسور را انتخاب کنید. برای این کار سادهترین و بهترین کاری که میتوانید انجام دهید، این است که در ابتدا یک زمین تست بطوری که تمامی قوانین مسابقه در آن رعایت و تمام شرایط برقرار باشد را آماده کنید و سپس از همان روش سمبلیک (طلق و ماژیک) استفاده کنید، که برای شروع جوابگوی کار ما میباشد. (در غیر اینصورت باید چندین برد سنسور آماده کنید که در ابتدا اکثراً با شکست مواجه می شوند که این موجب صرف وقت و هزینه است.)
چیدمان سنسورها صددرصد به قوانین و شرایط مسابقه بستگی دارد و ممکن است یک نوع چینش در مسابقهای موفق و در مسابقه و مسیری دیگر (قوانین متفاوت) از مسیر خارج شود و با شکست مواجه شود.

در ادامه مطلب چینش خطی و چینش هشتی را به عنوان بهترین ها ارایه شده است
چینش خطی سنسورها
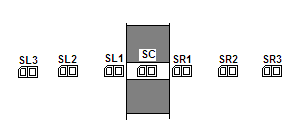
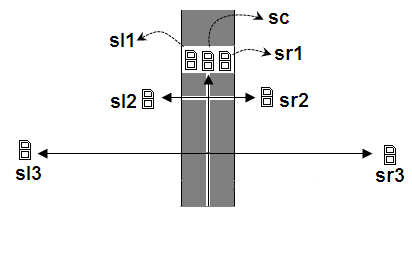
شما در شکل بالا می توانید طریقه قرارگیری سنسورها را روی خط مشاهده کنید. همانطور که در شکل نشان داده شده در این چینش از هفت سنسور استفاده شده، که یکی از آنها به عنوان سنسور مرکزی و سه سنسور در سمت چپ و سه سنسور نیز در سمت راست قرار دارد.
دو سنسور SR1,SL1 برای حرکت در خط مستقیم و صاف کردن ربات بعد از پیچها استفاده میشود در حقیقت با تنظیم دقیق PWMهای مربوط به این دو سنسور میتوان تیک زدنهای ربات را روی خط راست مهار کرد. (به فاصله کم این دو سنسور با خط راست توجه کنید.)
برای پیچهای معمولی ازSR2,SL2 و برای پیچ های تند از SR3,SL3 تند استفاده میکنیم.
نکات حائز اهمیت در این الگوریتم این است که:
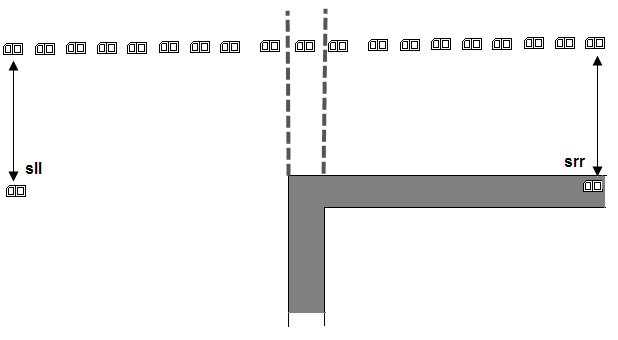
- تا وقتی که سنسور مرکزی روی خط قرار دارد ربات به سمت جلو حرکت می کند و این باعث میشود که ربات در هنگام کم و زیاد شدن عرض خط و یا در تقاطع بدون اعتنا به آن به مسیر خود ادامه دهد.
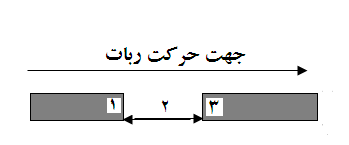
- در هنگام بریدگی به خاطر وجود سنسورهای کناری که ربات را کاملا در جهت خط قرار میدهند ربات تا قبل از رسیدن به نقطه بریدگی در حال اجرای مکرر تابع center است و در لحظهای که سنسور جلویی از نقطه شماره 1 جلو میافتد برنامه برای هیج عمل جدیدی فرمان صادر نمیکند چون اولا هیچ کدام از حالتهای موجود در برنامه اتفاق نمیافتد، ثانیا در آخر برنامه هیچ حالتی به عنوان default قرار نداده ایم در این حالت اگر سیستم حالت جدیدی یافت نکرد به حرکت و دستور قبلی خود ادامه می دهد. بنابراین ربات در برخورد به بریدگی، مستقیم به سمت جلو حرکت می کند تا سنسور جلو به نقطه 3 برسد و حرکت خود را ادامه بدهد.
تکمیل چینش خطی
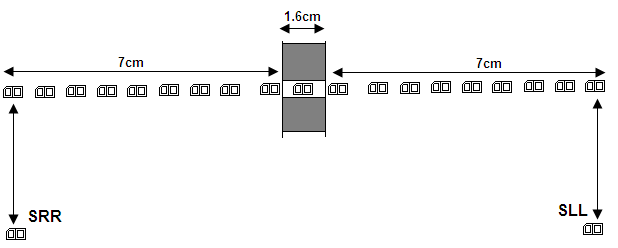
چینش خطی تکمیلی در مواجه با پیچ نود درجه
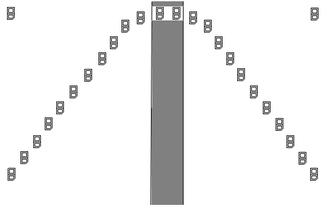
چینش هشتی سنسورها
در شکل بالا نحوه قرارگیری سنسورها را روی خط مشاهده میکنید این طرح سنسور نمونهای از چینش نوع هشتی است همانطور که مشاهده میکنید دو سنسور کناری که در دو طرف سنسور مرکزی قرار دارند جهت حرکت بر روی خط راست مورد استفاده قرار میگیرند، فاصله بسیارکم این سنسورها باعث میشود در سرعت های بالا کارآیی آنها کمشود بطوریکه بود و نبود آنها فرق نمیکند، ولی برای سرعتهای پایین عملکرد مناسبی دارد. در ضمن نحوه عملکرد این دو سنسور برخلاف سنسورهای دیگر است. چهار سنسور دیگر (sl2,sr2,sl3,sr3) که در دو طرف خط مشاهده میکنید برای حرکت در پیچها بهکار میرود. شکلی که در طرح سنسور خطی وجود دارد این است که طول کمی از آن مسیر را در آن واحد پردازش می کند یعنی اینکه اطلاعات کمی از مسیر دارد و باید بر اساس این اطلاعات کم پردازش و تصمیمگیری کند و دستورات را به موتورها صادر کند که این باعث ایجاد خطا میشود. از ویژگیهایی که این طرح دارد این استکه با توجه به تعداد کم سنسورهای استفاده شده میتواند اطلاعات جامعی در مورد مسیری که در طی دارد بدست آورد و بر اساس آن راحتتر میتوانیم تصمیمگیری کنیم.
از قابلیت های این نوع چینش دور زدن آرام و ساده در پیچهای تند است که با تنظیم pwm ها ربات به سادگی پیچ را طی میکند و هیچ وقت از مسیر منحرف نمیشود و خط را گم نمی کند.
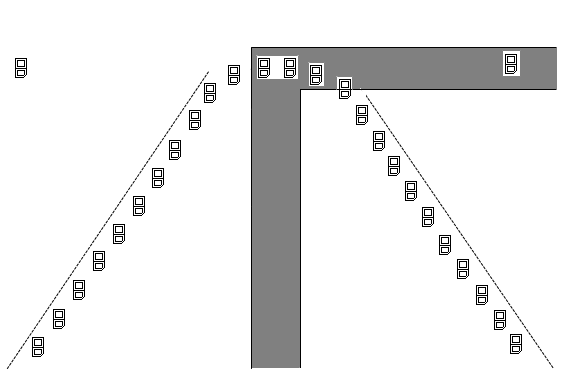
تکمیل چینش هشتی با سنسورهای invert

چینش هشتی در مواجه با پیچ نود درجه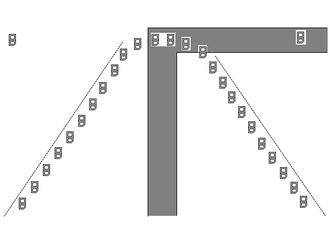
 گزارش کامل ساخت ربات مسیریاب را اینجا ببینید
گزارش کامل ساخت ربات مسیریاب را اینجا ببینید
مقالات مرتبط: